



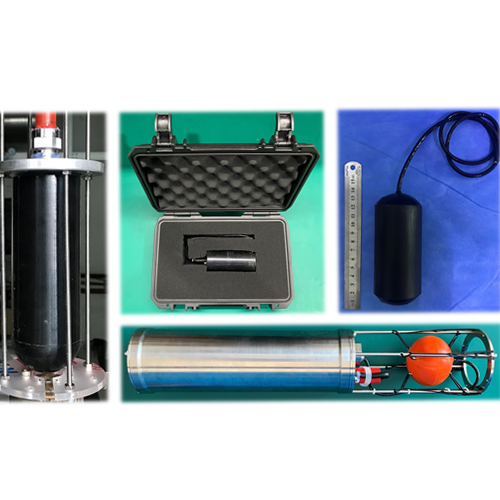
哈尔滨工程大学-海生物目标自主检测与抓取捕捞机器人

海洋牧场的海参、扇贝、海胆等生物目标检测与机器捕捞。
展品详情
1.所属领域:水下机器人技术
2.技术成熟度:中试
3.技术特点:
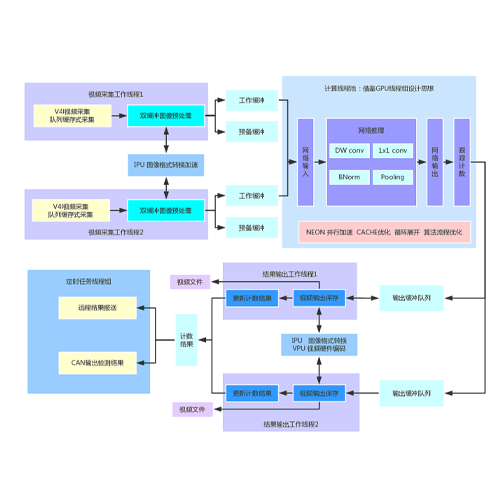
针对小样本提出迁移深度模型、模拟数据增广和多卷积层融合系统方法,实现水下可变形小目标准确识别和跟踪。并对声纳图像特点,提出改进的反距离加权插值算法,基于隶属度的模糊增强算法,提高了水下环境的成图质量和检测准确率,分别研制了自主吸纳和自主抓取作业两型水下机器人,作业中的干扰和遮挡研制了手眼融合规划和控制模型,实现了海洋自然养殖环境下的生物目标全自主规划、识别、定位、跟踪、控制和抓取。
4.应用领域:海洋牧场的海参、扇贝、海胆等生物目标检测与机器捕捞。
其他展品推荐
-

哈尔滨工程大学-哈尔滨工程大学展示
-
哈尔滨工程大学-5g-v2x通信数据链技术
-
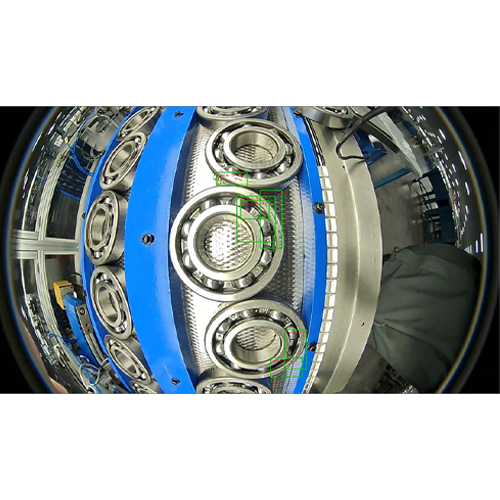
哈尔滨工程大学-装配轴承外观缺陷检测
-
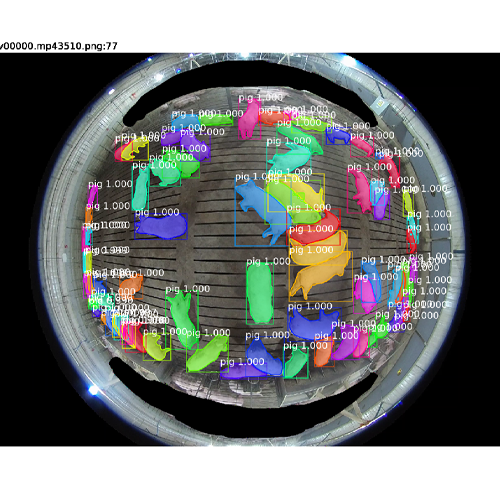
哈尔滨工程大学-基于智能图像处理的生猪体重测量及资产盘点系统
-

哈尔滨工程大学-网络欺骗诱捕系统
-
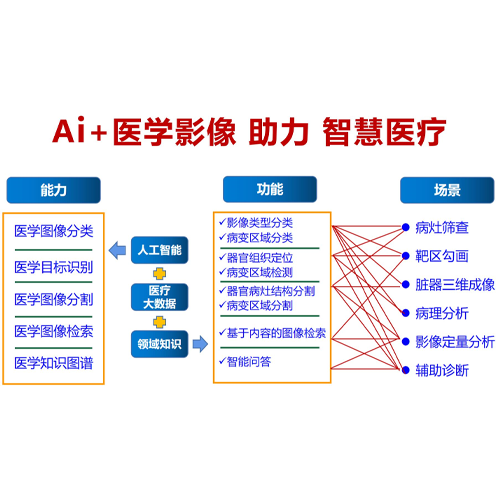
哈尔滨工程大学-智慧医疗
-
哈尔滨工程大学-人流量密度智能监测统计系统
-

哈尔滨工程大学-数据链生态服务体系与技术装备
-
哈尔滨工程大学-动态手势识别
-
哈尔滨工程大学-基于5G的高精度定位
-

哈尔滨工程大学-MIMO雷达4D成像系统
-

哈尔滨工程大学-智能安全座舱驾驶系统
-
哈尔滨工程大学-室内智慧导航服务系统
-
哈尔滨工程大学-系列化弛豫铁电单晶声矢量传感器
-

哈尔滨工程大学-水声通信机
-

哈尔滨工程大学-区域分布式水下通信网络系统
-

哈尔滨工程大学-北斗/GNSS高精度广域差分增强接收机
-
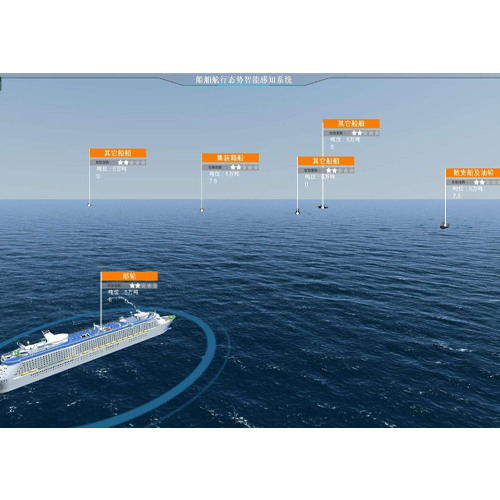
哈尔滨工程大学-船舶航行态势智能感知系统
-

哈尔滨工程大学-交互式电子技术手册(IETM)
-

哈尔滨工程大学-一体化便携式基站
-

哈尔滨工程大学-信号群分析技术支撑平台
-
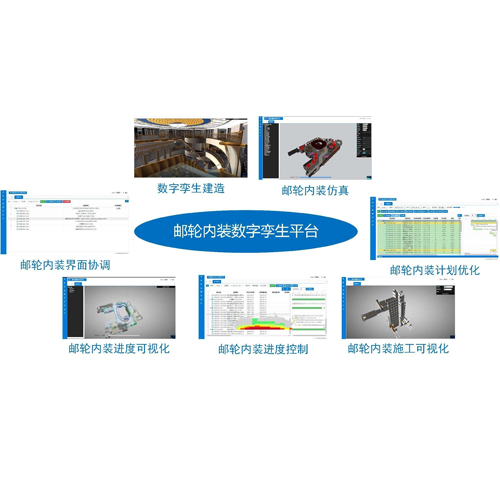
哈尔滨工程大学-大型邮轮全链条智能化协同集成平台
-

哈尔滨工程大学-波浪载荷计算软件
-
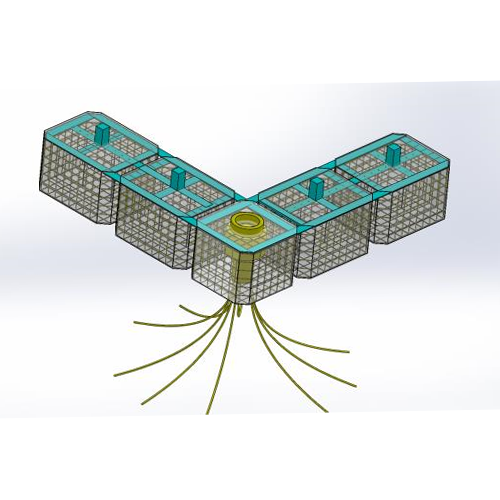
哈尔滨工程大学-深远海模块化养殖网箱平台
-

哈尔滨工程大学-中型情报监视侦查多航态无人航行器
-
哈尔滨工程大学-中国数值水池虚拟试验系统
-

哈尔滨工程大学-悟空号万米AUV