




世界5G大会组委会-基于【5G+V2X】的协同自动驾驶

展品详情
产品功能及原型设计理念和框架
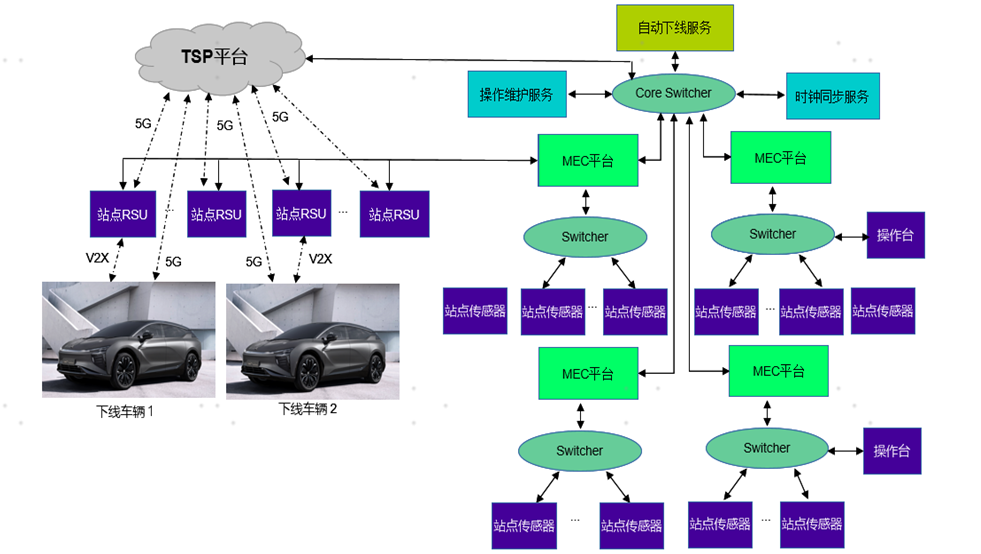
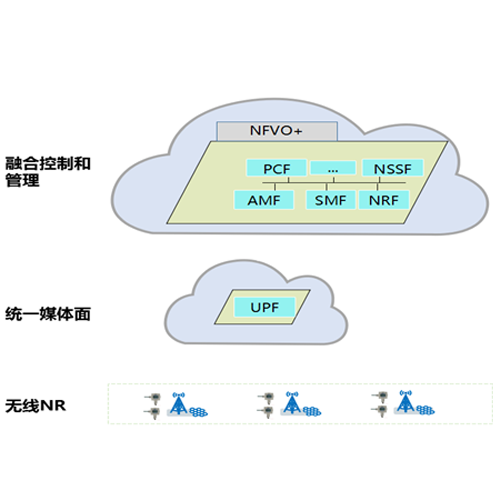
协同自动驾驶系统包括传输网络功能、平台基础功能和应用场景:
1协同自动驾驶网络及网络管理:以站点交换机、汇聚交换机和核心交换机三层组网,通过主备冗余、环形组网、NTP时钟同步、GPS放大器等保证网络性能和可靠性;网络和NTP时钟同步服务器、GPS放大器等都具备操作维护管理功能;
2 平台基础功能包括设备接入和管理维护、MEC平台管理
设备接入和管理维护:路侧通信设备、感知设备和监控设备,下线车辆和网络设备都以安全可靠方式接入TSP平台、MEC平台和边缘处理业务服务器,系统具备5G+C-V2X安全认证和完善的操作维护管理功能;
MEC平台管理:包括平台资源管理、接口管理、业务管理、业务连续性管理;
3 应用场景:系统支持基于场端的车辆感知和定位、车路协同规划与决策、基于车路协同自动泊车和C-V2X消息与应用。
基于场端的车辆感知和定位:场端通过路侧感知设备返回的感知数据,基于深度学习方法进行目标检测、融合跟踪处理;注意处理性能需要满足自动下线车辆连续安全行驶和自动泊车的控制要求;
车路协同规划与决策:场端根据车辆位置、交通环境、空闲车位的感知状态,对空闲目标车位进行决策调度,并将选择的目标车位、环境信息通过C-V2X PC5下发给车端,车端收到目标车位和环境信息后进行行驶路径优化;
基于车路协同自动泊车:场端通过C-V2X下发感知的障碍物信息,车辆定位信息,以及目标车位给车端,车端结合车辆位置信息、目标车位等完成路径优化和驾驶任务执行,通过路径跟踪算法输出控制指令给车辆EPS, ESC, BDCM等控制器实现车辆按照规划路径和驾驶任务行驶;
C-V2X消息与应用:自动驾驶下线UDM消息场景、国标MAP消息相关场景、国标RSI消息相关场景、国标RSM消息相关场景、国标BSM消息相关场景。
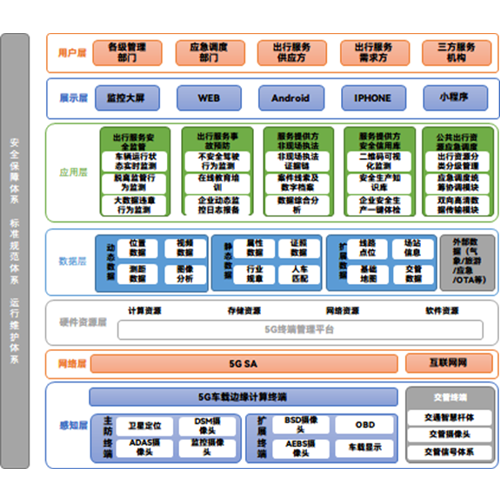
协同自动驾驶系统框架如下图。
创意特色及技术性能
华人运通协同自动驾驶系统是国际和国内首个基于【5G+V2X】的智能车辆、智能道路和云端平台深度协同(感知协同、规划协同、计算协同)实现量产下线车辆自动驾驶、自动泊车系统。
自动下线系统技术独特性:
1. 基于【5G+V2X】,专网和公网协同的全程连续覆盖高性能通信网络;
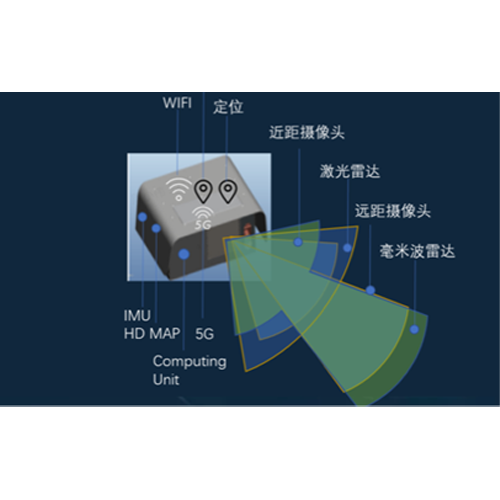
2. 全程高精度连续覆盖感知网络;
3. 场端RSU、MEC服务器、时钟服务器等多种异构类型设备协同,边缘计算和云端TSP平台协同;
4. 量产的产线下线智能网联车辆,充分利用车端先进的控制算法和多冗余线控底盘技术。
华人运通协同自动驾驶系统技术能力和性能:
1 高性能场端平台基础能力
场端和车端的通信传输时延,其中PC5网络通信时延平均为20-60 毫秒,RSU和MEC平台之间的通信时延平均为1~15毫秒,NTP时钟服务器的时间同步≤1 毫秒。
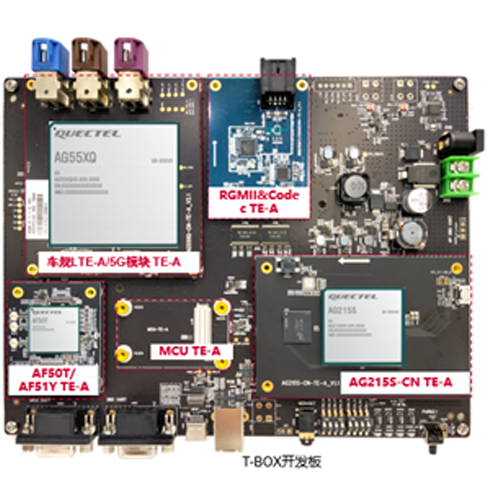
时钟服务器和交换机/光纤网络都具备管理和维护能力,T-BOX/RSU具备安全认证功能。
RSU利用TLS协议实现对TSP平台的认证,证书校验如图所示,认证通过后利用安全通道下载V2X应用证书:
T-BOX利用TLS协议实现对TSP的认证,证书校验如下图所示,认证通过后利用安全通道下载V2X假名证书;
RSU和T-BOX之间的V2X空口安全通信,支持对消息的数字签名和验证功能。RSU和T-BOX设备对SPDU消息的签名验签。
2 基于场端的车辆感知和定位
场端通过路侧感知设备激光雷达返回的激光雷达点云数据,基于深度学习方法进行目标检测,根据检测的目标信息,融合跟踪得到目标车辆的定位信息。路侧激光雷达能准确地进行目标检测,检测对象类型为:行人,自行车,小车,大卡车等。场端的定位精度满足自动下线车辆安全行驶和自动泊车的控制要求。场端经过融合追踪后的定位位置90.5%落在20cm误差带,定位角度95%落在2°误差带里面。
3 车路协同规划与决策,实现协同自动下线和自动泊车
场端根据车辆位置、交通环境、空闲车位的感知状态,对空闲目标车位进行决策调度,并将选择的目标车位、环境信息通过C-V2X PC5下发给车端泊车控制器。场端感知及定位信号周期为100ms,MEC感知融合处理和业务软件车路协同规划时延小于200ms;
车端泊车控制器收到目标车位和环境信息后,规划行驶路径和驾驶任务,发送到底盘线控系统执行。车端控车信号周期为20ms,车端上传信号周期为100ms。
项目相关专利:
1车灯控制方法、装置、设备和计算机可读存储介质
2虚拟斑马线投影控制方法、装置和虚拟斑马线投影系统
3 路侧设备、用于侧路设备的方法和车路协同系统
4车路协同系统:系统避障方法
5车路协同系统:系统两车优先级规划方法
与5G结合性及强相关性及产业联动效应
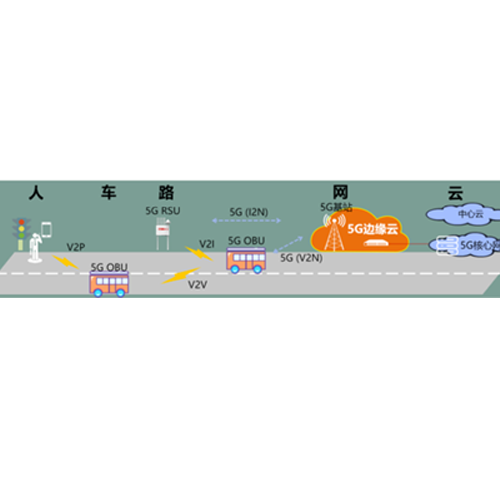
华人运通协同自动驾驶项目采用了5G+V2X组合通信方式进行协同自动驾驶应用建设,通过5G网络实现智能网联车辆和云端TSP平台交互,通过V2X实现智能网联车辆和场端MEC平台交互。因为车辆的移动性,及协同自动驾驶应用的高性能要求,华人运通协同自动驾驶系统的建设将对5G网络规模化应用到工业和交通带来极大的经济效益和社会意义。
据相关专业研究机构预测,至2050年整个智能出行的经济效益可达7万亿美金,其中包括3.7万亿的消费者乘车出行服务,3万亿的包裹快递和卡车运输服务,0.2万亿的运输途中美容医疗等创新服务以及0.3万亿缩短通勤时间等所创造的社会经济价值。同时,自动驾驶车路协同还可以做到:
1、减少90%因操作错误引起的车祸造成的人员伤亡,这相当于4880亿美金的保险赔偿金;
2、单车节省15%-30%的能源消耗,换算到整个汽车行业则相当于1850亿美金的能源支出。
3、交通优化可减少路面20%左右的汽车,给整个交通出行带来效率上的提升,其等效的商业价值在1500亿美金左右。
4、按照每位乘客300-400小时/人/年来计算,自动驾驶可以将这些驾驶时间用于工作和个人爱好,这直接可以释放将近5070亿的生产力。
5G与AI、大数据、先进计算、区块链等技术的融合度
5G与华人运通协同自动驾驶系统应用相关技术融合度:
1华人运通协同自动驾驶系统应用到的感知、规划和控制算法都是车辆相关数据驱动,车辆数据是通过5G回传到云端训练平台通过标注、训练和测试、仿真等验证完成。
2 华人运通协同自动驾驶系统车辆车联网功能,包括安全认证、地图和定位数据、设备管理、软件升级和部分设备远程控制等都通过5G网络进行;
3 随5G SA架构规模建设,5G业务编排和边缘化用户面处理能力落地,将极大促进实现智能网联车辆和场端的监控视频、感知视频等大数据实时交互,实现异常情况下的场端或云端自动驾驶接管服务,促进协同自动驾驶的规模化商业应用。
项目的价值以及市场需求、分析市场容量和
华人运通协同自动驾驶系统基于【5G+V2X】实现车、路、云协同自动驾驶的意义:
1无安全员的自动驾驶方案可以解决需要驾驶员或安全员,费用高、工作效率低,难以实现全程数字化和自动化管理弊端,通过车辆和场端、智能道路和云端协同可解决痛点。
(1)驾驶员或安全员效率低,如车辆下线时传统车辆驾驶员或安全员需要从下线工位到检测车间、停车场等目的地往返,中间等待时间长;
(2)单车自动驾驶车辆行驶路线和调度配置信息化低,不具有较高的弹性,难以实现闭环自动化过程;
(3)智能网联车辆执行业务过程难以全程数字化和自动化管理,反馈慢,难以及时迅速对业务系统进行实时分析和优化调整。
2 传统单车自动驾驶为主的方案,在车上大量堆砌传感器和控制器,通过车辆的感知系统(如雷达、摄像头等)获取周围障碍物的信息,然后车上的大脑(即各控制器)进行规划和决策,并将命令下达到各执行器(如动力系统、刹车系统等)去实施,是大部分的车厂和科技类企业现阶段还是以单车智能为主在开发自动驾驶。单车自动驾驶方案存在对车辆要求高,费用高,回落处理低效复杂、没有法规支持等问题。车路云协同自动驾驶路线,是一种采用先进的无线通信和人工智能、新一代互联网等技术,全方位地实施车与车之间、车与路之间和车与人之间动态实时的信息交互,在全时空动态交通信息采集3D感知数据并融合的基础上,开展车辆协同安全和道路协同控制,充分实现人车路的有效协同,保证无人化自动下线、自动泊车安全,提高业务效率,解决数字化管理,从而形成安全、高效和环保的量产车辆下线应用。自动下线采用的车路云协同自动驾驶,随配套因素完善可以推广到普通道路和高速公路,具有巨大的应用潜力和经济效益。
车路云协同自动驾驶不是一个新词,早在上世纪90年代就在欧美日等国家提出,并且形成了多种多样的解决方案。我国也很早引入了相关研究议题,2011年科技部在863计划中设立了主题项目“智能车路协同关键技术研究”。自动驾驶发展到今天,自动驾驶技术的逐渐完善以及越来越大的需求,未来智能化道路的市场预期,推升了车路云协同的快速发展。我国高速公路总里程突破14万公里。2018年,我国新增公路通车里程8.6万公里,其中高速公路6000公里,新建改建国省干线公路2万公里。根据2019年预期目标,要完成公路水路固定资产投资1.8万亿元左右;新改建农村公路20万公里,实现具备条件的乡镇、建制村通硬化路;新增通客车建制村5000个,其中贫困地区3000个。这么多的新增道路建设中会有很大的智能化建设需求,而这些需求就是我们车路协同的出发点和立足点。
2017年,国务院印发《“十三五”现代综合交通运输体系发展规划》,要求优化交通运行和管理控制手段,包括建立高效运转的管理控制系统。明确提出开展新一代国家交通控制网、智慧公路建设试点,示范推广车路协同技术,应用智能车载设备,建设智能路侧设施。交通运输部结合交通强国战略,在政策制定上前所未有的提出“大胆创新、鼓励探索、包容失败”,强调站位要高、服从大局。各部委后续出台的《智能汽车创新发展战略》、《数字交通发展规划纲要》、《关于加快推进新一代国家交通控制网和智慧公路试点的通知》,都针对车路协同相关的自动驾驶、智慧公路、数字交通建设,包括目标、重点任务和资金,政策面给出了清晰、具体、可行的安排。2018年2月,交通运输部发布了《交通运输部办公厅关于加快推进新一代国家交通控制网和智慧公路试点的通知》,提出重点发展交通控制网和智慧公路。主要包括:1、基础设施数字化;2、路运一体化车路协同;3、北斗高精度定位综合应用;4、基于大数据的路网综合管理;5“互联网+”路网综合服务;6、新一代国家交通控制网等六个方向主题。该通知决定在北京、河北、吉林、江苏、浙江、福建、江西、河南、广东九省市加速智慧公路试点。这些政策必将转化成我们车路协同的助推器和催化剂。
中国在车路云协同方面的机会是非常独特的。中国比世界任何其他国家都有一个更好的机会,可以向世界其他地方展示如何把人工智能、5G通信、自动驾驶等技术用于改善人们的生活质量。首先中国的数据规模十分巨大,而且中国政府非常支持人工智能产业,积极推动利用大数据让社会受益。政府有能力通过推动数据标准化和数据源整合造福社会。不仅如此,政府有驱动力去做一些企业不会主动去做的、不盈利的、然而很有社会价值的事情,比如从移动运营商、道路交通、城市生活平台等收集数据并整合,更好地规划和调整车流、物流和人流。其次,中国在5G、大规模MIMO、频谱共享、超密集异构网络、边缘计算、感知技术和大数据AI应用等领域已建立起一定的核心知识产权和能力,为车路云协同技术提供了强有力的支撑。
商业模式
华人运通协同自动驾驶系统定位是智能网联车辆、5G+V2X网络、智能道路高精度感知系统、边缘MEC平台和云端TSP平台协同实现的智能网联车辆无人驾驶和无人泊车系统,可节省行车驾驶员或安全员、泊车驾驶员的费用,可以用于车辆下线、泊车、园区接驳/观光、无人物流等应用中。
假设投放一辆自动驾驶园区接驳/观光车到某大型游乐园区固定路线中,按每天970人次乘坐、单次票价仅10元来计算的话,一年便可以创造营收近360万元,商业价值相当可观。按车辆生命周期十年来计算,去除日常运营维护成本,一辆自动驾驶园区接驳观光车全生命周期可以创造近3000万的利润,市场前景相当可观。
其他展品推荐
-
世界5G大会组委会-浙江横店东磁电池片工厂5G智慧工厂项目
-

世界5G大会组委会-基于MEC的5G V2X车路协同先导应用
-
世界5G大会组委会-基于5G安全专网的新一代运载火箭总装测试 智能制造项目
-

世界5G大会组委会-天翼超高清5G+高清互动视频项目
-

世界5G大会组委会-5G赋能全栈全线自主可控智能仓储解决方案
-

世界5G大会组委会-基于5G+V2X的智慧路口城市级示范与应用
-
世界5G大会组委会-5G车路协同系统关键技术及产业应用
-

世界5G大会组委会-基于5G的AR远程运维服务平台
-

世界5G大会组委会-焦煤千业水泥5G绿色无人矿山
-

世界5G大会组委会-一种基于5G-MEC的VR虚拟现实超声教学创新应用
-
世界5G大会组委会-北京市当红齐天集团5G VR竞技项目
-
世界5G大会组委会-黑龙江省建龙阿城钢铁有限公司5G+工业互联网项目
-
世界5G大会组委会-5G-TBOX在V2X车路协同创新技术中的应用研究
-
世界5G大会组委会-5G+MEC+V2X 车联网解决方案
-

世界5G大会组委会-基于5G技术的智慧工厂项目
-

世界5G大会组委会-黑河高寒无人驾驶5G专网及办公网采购项目
-

世界5G大会组委会-哈电集团5G实训基地项目
-

世界5G大会组委会-赋能双碳行动,加速产业转型 ——基于5G虚拟专网的能源大数据中心应用实践
-
世界5G大会组委会-江苏仅一联合智造5G智慧园区项目
-
5G“智慧云脑”助力散杂货港口数字化转型
-
世界5G大会组委会-基于5G的智慧公共出行及应急指挥调度服务
-

世界5G大会组委会-黑龙江省建龙阿城钢铁有限公司5G+工业互联网项目
-

龙煤鸡西矿业有限责任公司 5G 智慧矿山项目
-
黑龙江龙煤鸡西矿业有限责任公司东山煤矿 5G+智能矿山通信系统
-

世界5G大会组委会-中国一重智慧制造项目
-
基于5G的山河智能绿色智慧矿山调度运营平台
-
世界5G大会组委会-AI城市巡兵-基于5G+云网融合的城市公交感知系统
-

山东能源集团5G智慧矿山应用
-
中海油东海钻井平台5G融合应用项目
-

5G助力天津港打造智慧、绿色的世界一流港口
-

世界5G大会组委会-国网山东电力5G智能电网规模化应用示范项目建设
-

基于5G和大数据技术的智慧社区云控管理平台
-

基于5G和北斗三代融合感知及通信应用
-

数字大庆:5G智慧城市
-
牡丹江5G+城市全域文旅数字化建设
-
数字宁安:数据要素驱动的5G数字化县
-

5G架构下超便携混合现实颅脑手术导航系统建设
-
基于5G+MEC+数字孪生的广东碧道智慧化管理项目
-
5G全连接智慧家庭病房
-

北京城市副中心5G远程医疗赋能通州“城市大脑”
-
基于5G的远程手术机器人多点协同手术应用研究
-

黑龙江省医院5G远程会诊及手术远程指导项目
-

5G+智慧燃气数字赋能超大城市公共安全
-

大庆龙南医院5G+VR隔离探视项目
-
5G融合水下光通信及感知关键技术研究
-

健康龙江-5G数字智慧药房示范应用
-

健康龙江:5G智慧医疗
-

南昌急救中心5G+AR协同急救平台
-

5G MEC+AI赋能福田全民健康典范城区
-

打造5G智慧应急救援体系,构建院前生命通道,助力医疗数智化转型升级
-

中国科大附一院5G+多融合远程诊断及会诊转诊平台